SUIVEUR DE LIGNE MBOT2
1 - ajouter le bloc "capteur quad RGB(béta)"
Pour cela nous allons utiliser le nouveau capteur RGB situé à l’avant de notre mBot2.


Pour vous aider :
2 - utiliser les blocs suivant pour réaliser votre programme






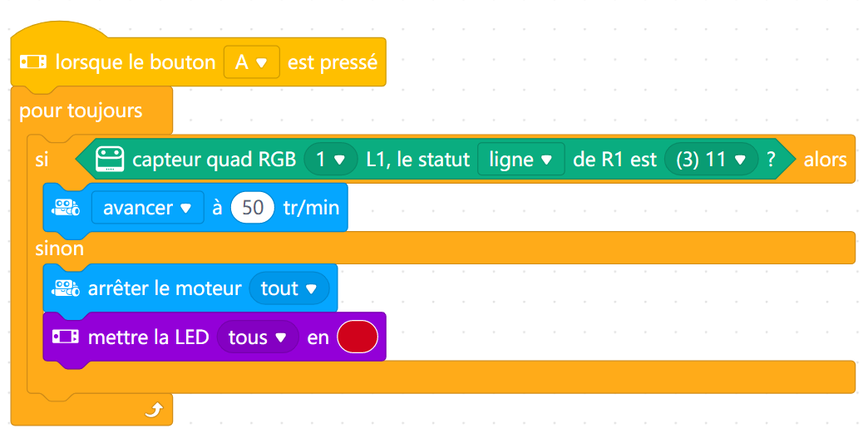
3 - Réalisation du programme suiveur de ligne

Pour cela nous allons utiliser le capteur situé à l’avant de notre MBot.
Il s’agit de l’instruction « état du suiveur de ligne sur port » Le principe de fonctionnement est le suivant :
– Lorsque les deux capteurs détectent une couleur claire la valeur état suiveur est à 0.
– Lorsque le capteur de droite détecte une couleur claire et le capteur de gauche détecte une couleur foncée la valeur état
suiveur est à 1.
– Lorsque le capteur de droite détecte une couleur foncée et le capteur de gauche détecte une couleur claire la valeur état
suiveur est à 2.
– Lorsque les deux capteurs détectent une couleur foncée la valeur état suiveur est à 3.
3 - 1 - Avec un petit schéma de la lecture du capteur Quad RGB ce sera plus clair !

3 - 2 - voici des vidéos qui peuvent t'aider à réaliser ton programme
3 - 2 - 1 - le robot suit une ligne et s’arrête à 10 cm du cube
3 - 2 - 1 - 1 - programme d'initiation
1 - détection de la couleur rouge

2 - suivre une ligne droite

3 - suivre une ligne droite plus simplement
4 - on pourrait programmer de cette façon aussi

5 - Dés que le robot détecte un obstacle, il s’arrête.

3 - 2 - 1 - 2 - programme pour fluidifier le mouvement

3 - 2 - 1 - 3 - programme expert

TRAVAIL A FAIRE :
- Écrire l’algorithme correspondant au problème posé sur libreoffice et enregistrer l'algorithme dans votre espace "perso"
- Voici comment vous pouvez débuter l'écriture de l'algorithme
- Écrire le programme correspondant sous Mblock v5
- Tester le programme avec le robot
- Faire une copie d’écran du programme et le coller avec votre algorithme que vous aurez écrit.
Réalisez le programme suivant en créant 4 variables :
- puissance : qui permet de définir une puissance des moteurs de départ
- puissance_gauche : pour gérer la puissance du moteur gauche en fonction de la position sur la ligne
- puissance_droite : pour gérer la puissance du moteur droit en fonction de la position sur la ligne
- ecart_position : qui permet d’ajuster la position de sortie de ligne



