Liaisons entre les blocs
1 - Liaison chronologique
1 - 1 - Par emboîtement

1 - 2 - Par lien filaire (flux) : on tire un fil entre les deux blocs (la souris devient une bobine).



2 - transmission de valeurs entre blocs
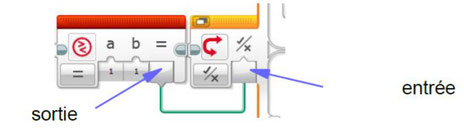
2 - 1 - Il faut tirer un fil entre la sortie et l'entrée)
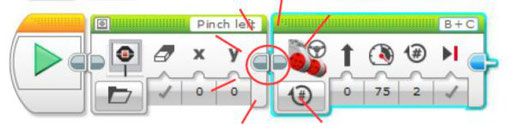
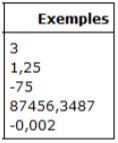
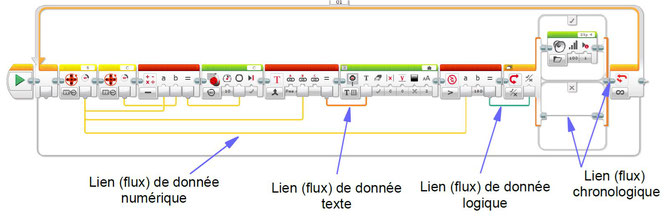
Types de données : numérique
Forme :
Couleur lien : jaune

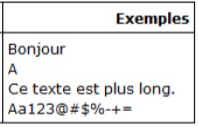
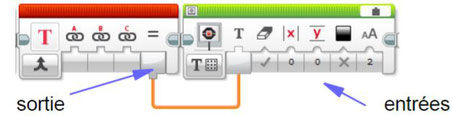
Types de données : texte
Forme :
Couleur lien : orange
Types de données : logique
Forme : 
Couleur lien : vert
2 - 2 - Exemple
2 - 3 - Exemples de programme
Un rire est poussé si on appuie sur le bouton tactile et le moteur A se met à tourner (6 tours).

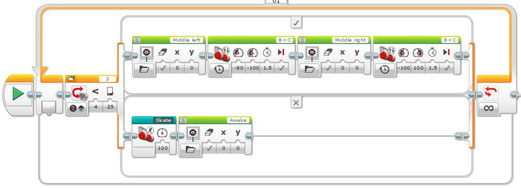
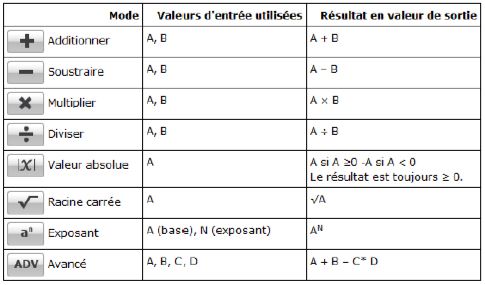
Le robot avance en louvoyant. Si la lumière dépasse 4, alors il effectue la manœuvre « skate » et affiche une mine réveillée sur l'écran.
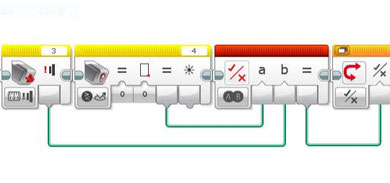
2 - 4 - Exemples de programme avec le OU
3 – Déroulement du programme
Le moteur C ne commencera à tourner que lorsque le moteur B aura fait ses 10 tours.

Dans l'exemple ci-dessus, le moteur C va s'arrêter car il est freiné à la fin de son tour de rotation (maintien de la position) alors que le moteur B s'arrêtera librement par frottement et ne sera pas bloqué.
Dans le cas suivant, le moteur B démarre et le moteur C se lance immédiatement après. Le programme s'arrête s'il n'y a plus de bloc.

4 – Boucles
Pour qu'un programme se répète, ou une partie seulement, il faut mettre une boucle infinie, ou une boucle avec une condition de sortie.
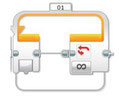
exemple Boucle infinie

exemple une boucle avec une condition de sortie.

Appui sur le bouton du centre, par exemple, pour sortir de la boucle
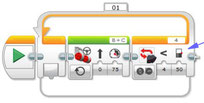
Ici, les deux moteurs fonctionnent tant que la distance mesurée par le capteur infrarouge ne descend pas en dessous d'une certaine limite.
5 – Test
Il est souvent nécessaire de faire un choix logique binaire (vrai ou faux) entraînant des actions différentes suivant le cas.
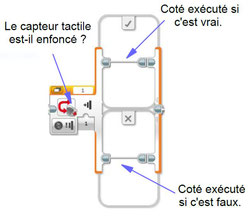
Exemple :
Les deux moteurs tournent si le capteur tactile est enfoncé, sinon, arrêt.

6 – Test multiples
Contrôle des moteurs par la télécommande


Vocalisation des couleurs détectées

7 – Calculs
Il est parfois nécessaire de faire des calculs.
7 - 1 - 1 calculs de lumière
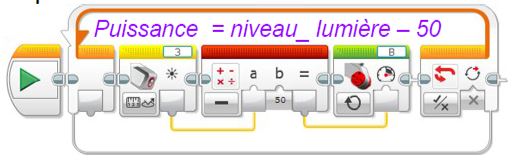
Ci-dessus : exemple de calcul de la commande de puissance du moteur à partir de la sensibilité lumineuse.
7 - 1 - 2 Lecture sur la brique de la lumière réfléchie et association à une boucle
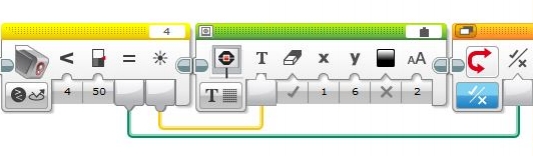
7 - 2 - 1 calculs de compteurs
Ou encore l'exemple suivant qui affiche sur l'écran le nombre de fois où le capteur tactile a été appuyé.
7 - 2 - 2 calculs à partir de 2 variables
variable "temps" variable "secondes"
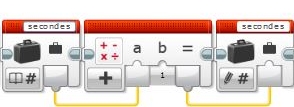
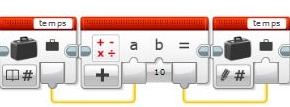
Spirale avec 2 variables, une vitesse appelée "temps" et une autre variable appelée "secondes"
