Comment réaliser un déplacement précis pour le robot EV3 ?
Vidéos sur l'utilisation de robots dans l'industrie
vidéo 1 : Robot Kiva chez ikéa.
Vidéo 3 : Déplacement des robots chez amazon
Préambule
Si tu n'as pas encore créer ton dossier technologie alors :
Il vous est demandé de créer un dossier
« technologie » dans votre espace "perso" et de créer un dossier « robot » dans le dossier
« technologie ». L’ensemble des activités seront enregistrées dans le dossier « robot ».
ÉTAPE 1 : Analyser le déplacement du robot.
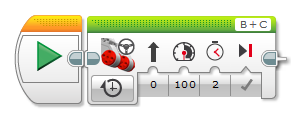
Lancer le logiciel « mindstorms EV3 » et réaliser le programme 1 que vous enregistrerez dans le dossier « Technologie ». Réaliser le fichier « déplacement 1 ».
Faire tes premiers pas dans la programmation avec le logiciel « mindstorms EV3 ».
Regarder les vidéos :
Coup de pouce 1 :
PREMIERS PAS SUR PC/MAC
Coup de pouce 2 :
File navigation :
Cet écran permet d'accéder à tous les fichiers de la brique EV3,
y compris ceux stockés sur la carte SD, et de les gérer.
Les fichiers sont organisés dans des dossiers de projet qui contiennent les fichiers du programme, mais aussi les sons et les images utilisés dans chaque projet.
Vous pouvez aussi déplacer et supprimer les fichiers dans cet explorateur de fichiers.
déplacement 1 : enregistrer le programme avec votre nom et dep1

déplacement 2 : enregistrer le programme avec votre nom et dep2
-
Enregistrez votre programme dans votre espace "perso" où vous aurez créé un dossier "technologie" et ensuite un dossier "robot".
- Vous pouvez modifier le nom de votre fichier créé sous "mindstorm EV3".
- Pour récupérer vos fichiers téléchargés dans la brique, déplacez-vous dans dossier, sélectionnez votre dossier et vous pouvez lancez votre ou vos programmes.
Les dossiers sont enregistrés sur "file navigation"

ÉTAPE 2 : analyser un algorithme
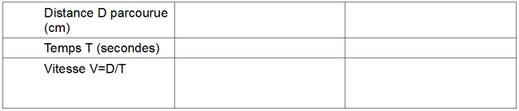
Compléter le tableau sur votre feuille sur les distances que vous avez obtenues dans la 1ère étape lors des 2 déplacements.
Comment obtenir notre vitesse en km/h?
Vous aurez besoin d'une grande règle et d'un crayon à papier pour noter le départ et l'arrivée du robot.
ÉTAPE 3 : écrire un algorithme
Compléter l’algorithme de la situation 2.
ÉTAPE 4 : écrire un programme
En vous aidant de l’algorithme de la situation 2 (Étape 2), compléter ci-dessous le programme pour que le robot avance de 50 cm.
coup de pouce : vidéo en anglais
tableau à compléter avec dep1 et dep2
Convertir une vitesse (cm/s) en (km/h)
Pour convertir la vitesse en cm/s en km/h il suffira de multiplier par 0.036 la vitesse obtenue. Exemple : vitesse (cm/s) = 100 cm/s
alors nous obtiendrons Vitesse (km/h) = 100 x 0.036 = 3.6 km/h
Algorithme à compléter avec dep1 et dep2

ÉTAPE 5 : Mettre au point et exécuter un programme
Dans le programme précédemment fait, faire une rotation de 90° à droite pour le robot.
A partir des 3 blocs de rotation, déterminer les rotations possibles.
Coup de pouce 1 :
- Utiliser le bloc rotation en sélectionnant le temps en seconde.
- Modifier soit le temps en seconde en notant correctement la "," exemple "1,3" et non le "."
Coup de pouce 2 : si vous n'arrivez pas avec le temps, testez le programme ci-dessous. ATTENTION AUX SENS DES FLÈCHES!!!

rotation 1 : enregistrer le programme avec votre nom et rot1

rotation 2 : enregistrer le programme avec votre nom et rot2

rotation 3 : enregistrer le programme avec votre nom et rot3

ÉTAPE 6 : Mettre au point et exécuter un programme
Réaliser le programme
suivant 
1ère évaluation : Le robot arrive à suivre le parcours sans le mordre. (5 pts)
2ème évaluation : La roue gauche ou la roue droite doit suivre le parcours sans en sortir. (10 pts)
Chaque translation (1 pt)
Chaque rotation à 90°(2 pts)
Chaque translation fait 25 cm
Coup de pouce 1 : Le diamètre de la roue est de 56mm soit 5,6cm. Vous pouvez déterminer le périmètre ou la circonférence de la
roue.
Périmètre (cm) = Pi x Diamètre(cm) = 3,14159 x 5,6
avec Pi = 3,14159
donc pour 1 tour de roue, le robot aura avancé de "périmètre" cm.
Coup de pouce 2 : le capteur gyroscopique (attention difficile de mettre en œuvre):


ÉTAPE 7 : Programmer chez soi
Tous ces programmes peuvent être réalisés à la maison, il suffit de se connecter sur ce site. Vous pouvez réaliser vos programmes à la maison, les enregistrer sur clé USB et nous les essayerons en classe. BON COURAGE :)