Comment programmer le robot pour qu’il suive la ligne noire ?
Préambule
Si tu n'as pas encore créer ton dossier technologie alors :
Il vous est demandé de créer un dossier « technologie » dans votre espace "perso" et de créer un autre dossier « robot » dans le dossier « technologie ». L’ensemble des activités seront enregistrées dans le dossier « robot ».
Étape 0 : Déplacement du robot
Étape 1 : Mesurer la couleur
Pour mesurer, allumer le robot, déplacer le curseur dans « Port view », rechercher le capteur « COL-REFLECT » correspondant, la valeur s’affichera à l’écran en « pct ». Noter les valeurs dans le tableau.
Vous pouvez aussi programmer la lecture des valeurs sur la brique EV3 en réalisant les programmes suivant :
mesure de l'intensité de la lumière réfléchie

Ici le capteur est branché sur le port 3 et les deux moteur sont branchés sur le port B et sur le port C. Nous pouvons lire directement la valeur. Il suffit de déplacer le robot et de le poser sur la couleur à lire.
mesure de l'intensité de la lumière réfléchie avec l'ancien programme

Compare l'intensité de la lumière réfléchie avec l'ancien programme

Noter les valeurs dans votre tableau
|
|
noir |
rouge |
bleu |
jaune |
blanc |
vert |
Marron |
vide |
|
|
|
|
|
|
|
|
|
|
|
PCT : détection de lumière ambiante |
|
|
|
|
|
|
|
|
Pour le reste de l'activité nous prendrons la référence couleur inférieure à la valeur correspondant au noir.
Vidéo 1 : suiveur de ligne
Vidéo 2 : suiveur de ligne à tête chercheuse non faisable en classe
Vidéo 3 : suivre une ligne
Vidéo 4 : suivre une ligne
Les couleurs sont sur ce site.
ÉTAPE 2 : Faire avancer le robot autrement
Programmer le robot pour que celui-ci avance en tournant seulement.
Remarque :
Le robot doit tourner à droite, alors la roue droite ne doit pas tourner.
Puis le robot doit tourner à gauche, alors la roue gauche ne doit pas tourner.
ainsi de suite sur une longueur de 30 cm.
Que remarquez-vous? Quel algorithme pourrait-on écrire?
Si vous avez réussi à programmer avec les boucles, passer directement à l'étape 6.
ÉTAPE 3 : programmer le robot
Programmer le robot pour que celui-ci tourne à droite dès qu'il perçoit une ligne noire.
Nous pouvons introduire la notion de boucle. Pour cela l'algorithme a été écrit.
Coup de pouce 1 : Programmation avec une boucle.
Si vous avez réussi à programmer avec une boucle, passer directement à l'étape 6.
Coup de pouce : Tutoriel possible pour pouvoir écrire le programme.
ÉTAPE 4 : Faire avancer le robot autrement
Programmer le robot pour que celui-ci avance en tournant seulement. Le programme que vous venez de réaliser est trop grand. Je vous propose d'utiliser dans "Contrôle du déroulement" la fonction "boucle". La procédure boucle infinie vous permettra de réduire votre programme et d'atteindre vos objectif.
Arrêter son robot sur une ligne. Compléter le programme suivant avec l'ancien programme

Utilisation de la boucle "répéter indéfiniment"

Utilisation de la boucle avec l'ancien programme

ÉTAPE 5 : évaluation - Faire suivre une ligne
scénario : Pour que le robot suive une ligne noire, il doit constamment s'orienter en fonction de la ligne. Avant de réaliser le programme, veuillez réfléchir à un algorithme et un algorigramme possibles. Veuillez compléter l'algorithme présent à droite sur votre feuille après avoir visionner la vidéo (attention arrêter le son de la vidéo).
Attention : chaque intervention de l'enseignant enlève des points.
Algorithme et algorigramme à écrire sur feuille libre proprement avec votre Nom, Prénom, Classe, Date (5 pts + 5 pts)

Vous venez d'écrire un l'algorithme et un algorigramme permettant de suivre une ligne noire. Coup de pouce éventuellement.
ÉTAPE 6 : évaluation (10 points) Programmer pour suivre une ligne. A montrer en 30 minutes avant la fin de la séance.
Pour que le robot suive une ligne noire, il doit constamment s'orienter en fonction de la ligne. Vous allez devoir sélectionner dans "contrôle du déroulement" la fonction "boucle" et ensuite la fonction "sélecteur". Vous intégrerez la fonction "sélecteur" dans la fonction "boucle". Il vous suffira de compléter le petit programme et ensuite de le téléverser dans votre robot.
Attention chaque intervention de l'enseignant enlève des points
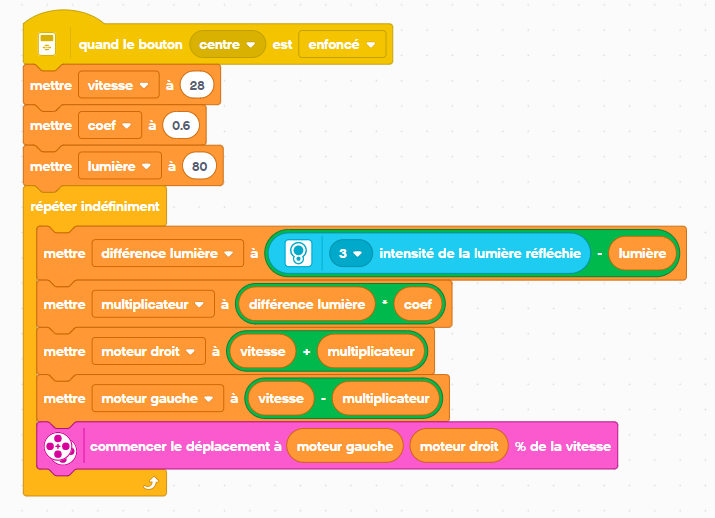
ÉTAPE 7 : Programmer pour suivre une ligne le plus rapidement (pour les plus rapides)
Pour que le robot suive rapidement une ligne noire, il doit d'abord avancer et dès qu'il rencontre une ligne noir il doit s'orienter en fonction de la ligne. Vous allez devoir rajouter au programme précédent un bloc qui permettra de réaliser cette recherche rapide.
Coup de pouce : Vidéo tutoriel capteur couleurs et capteur ultrason.
capteur avec si alors sinon...

Sélecteur "capteur de couleur - comparer - couleur : 1 (noire)" avec l'ancien programme

répéter indéfiniment capteur avec si alors sinon...

Sélecteur capteur de couleur dans une boucle infinie avec l'ancien programme


ÉTAPE 8 : Programmer pour suivre une ligne le plus rapidement (pour les plus rapides)
ÉTAPE 8 : Programmer pour suivre une ligne le plus rapidement (pour les plus rapides) avec l'ancien programme

ÉTAPE 9 : Programmer pour suivre une ligne le plus rapidement - coup de pouce
