Comment programmer le robot pour obtenir le déplacement du robot-aspirateur?
Pour réaliser cette recherche, vous allez devoir diviser votre équipe en 2. "1 - Le déplacement à partir de la tablette" se fait ensemble, les 2 équipes ensembles. Ensuite vous devrez vous répartir sur les postes informatiques et la tablette.
L'équipe 1 devra programmer à partir des postes informatiques avec le logiciel "mindstorm lego"
L'équipe 2 devra programmer à partir de la tablette mise à votre disposition avec le logiciel "programmer" "lego".
Chaque équipe est autonome. Vous avez en votre possession un Robot EV3 pour les 2 équipes.
1 - Déplacement à partir de la tablette.
1 - 1 - 1 - Déplacement à partir de la tablette
Pour le déplacement en spirale je vous propose de faire un essai tous ensemble avec la tablette. (rappel rotation niveau 1). ATTENTION UN SEUL ÉLÈVE UTILISE LA TABLETTE!!. ATTENTION UN SEUL ÉLÈVE UTILISE LE ROBOT EV3!!.
- Allumer le robot EV3. Le positionner par terre, à coté de votre table.
- Allumer la tablette. ATTENTION UN SEUL ÉLÈVE UTILISE LA TABLETTE!!. Entrer dans le compte "élèves". Lancer le logiciel "programmer".
- Connecter en Bluetooth le robot EV3 et votre tablette. Pour cela vous devez :
- Dans le robot EV3 vérifier que le Bluetooth soit activé OU activé le!!!
- Dans la tablette en haut à droite apparaît le logo d'une brique EV3 et une croix. Sélectionner ce logo.
- Une boite de dialogue apparaît sur l'écran de la tablette "Connecter la brique EV3 à la tablette". Suivre les instruction et sélectionner "se connecter". Sélectionner le nom du robot de votre îlot qui apparait. Si cela ne fonctionne pas, recommencer les étapes.
- Le nom du robot doit apparaître en bas à droite de l'écran de la tablette.
- Pour vérifier le bon fonctionnement du robot, sélectionner "Déplacement char" et ensuite mettre les caractéristiques suivantes :
- Puissance à gauche : -100
- Puissance à droite : 100
- "Déplacement char" "Activé pendant (secondes)" : 1 seconde
- "Roue libre"
- Enfin appuyer sur la flèche verte du programme. Le programme se télécharge dans le robot EV3, un son retenti après le téléversement, le programme se lance immédiatement. Le robot doit effectuer un déplacement char rotation 3.
1 - 1 - 2 - Déplacement et/ou son et/ou DEL orange à partir du Bluetooth
Voici un programme à réaliser sur la tablette et répondre par vrai ou faux aux questions suivantes.
programme 1

programme 2
Programme 3

Programme 4

Programme 5

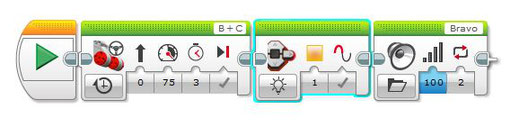
programme 1
- Le robot dit "Bravo" pendant 3 secondes : VRAI - FAUX
- Le D.E.L. clignote pendant 3 secondes : VRAI - FAUX
- Le robot avance de 3 tours de roues : VRAI - FAUX
- La D.E.L. est verte à la fin du programme : VRAI - FAUX
programme 2
- Le robot dit "Bravo" pendant 3 secondes : VRAI - FAUX
- Le D.E.L. clignote pendant 3 secondes : VRAI - FAUX
- Le robot avance de 3 tours de roues : VRAI - FAUX
- La D.E.L. est verte à la fin du programme : VRAI - FAUX
programme 3
- Le robot dit "Bravo" pendant 3 secondes : VRAI - FAUX
- Le D.E.L. clignote pendant 3 secondes : VRAI - FAUX
- Le robot avance de 3 tours de roues : VRAI - FAUX
- La D.E.L. est verte à la fin du programme : VRAI - FAUX
programme 4
- Le robot dit "Bravo" pendant 3 secondes : VRAI - FAUX
- Le D.E.L. clignote pendant 3 secondes : VRAI - FAUX
- Le robot avance de 3 tours de roues : VRAI - FAUX
- La D.E.L. est verte à la fin du programme : VRAI - FAUX
programme 5
- Le robot dit "Bravo" pendant 3 secondes : VRAI - FAUX
- Le D.E.L. clignote pendant 3 secondes : VRAI - FAUX
- Le robot avance de 3 tours de roues : VRAI - FAUX
- La D.E.L. est verte à la fin du programme : VRAI - FAUX
1 - 1 - 3 - Affichage sur tablette et Exemples de programmes sur tablette et ordinateur
1 - 1 - 3 - 1 - Lors de la connexion vous verrez apparaitre les caractéristiques de votre robot.

1 - 1 - 3 - 2 - Voici un programme réalisé sur tablette

1 - 1 - 3 - 3 - Voici deux programmes réalisés sur ordinateur


1 - 2 - La 1ere spirale sur ordinateur et tablette
IMPORTANT : Le robot tournera dans le sens horaire.
SCENARIO : Le robot tourne pendant 1 seconde avec une des 2 roues à vitesse 0 ensuite le robot réalise des cercles de plus en plus grand. On augmentera de 10 la vitesse de la roue à chaque étape. Cette spirale ne durera pas plus de 30 secondes.
Récapitulatif.
- Le robot tourne avec un moteur à la vitesse de 100 et l'autre moteur à la vitesse de 0 pendant 1 seconde
- Ensuite le robot tourne avec toujours le même moteur à la vitesse de 100 et l'autre moteur à la vitesse de 10 pendant 1 seconde
- Ensuite le robot tourne avec toujours le même moteur à la vitesse de 100 et l'autre moteur à la vitesse de 20 pendant 2 secondes
- Ensuite le robot tourne avec toujours le même moteur à la vitesse de 100 et l'autre moteur à la vitesse de 30 pendant 3 secondes
- Et ainsi de suite.
Le programme final sera présenté à l'enseignant qui validera le programme "prénoms spirale 1".
Pouvons-nous affirmer que nous venons de réaliser une vraie spirale? Pourquoi? :
Quel trajet fait notre robot EV3? :
Pouvons nous l'améliorer? Comment?
1 - 3 - La 1ere spirale sur ordinateur seulement
Créer la même spirale mais en ajoutant des opérateurs logiques et des variables. Vous ne pouvez le faire que sur ordinateur.
1 - 4 - La 2ème spirale sur ordinateur et tablette
IMPORTANT : Le robot tournera dans le sens horaire.
SCENARIO : Le robot avance 0.2 seconde tourne à 45° dans le sens horaire et avance de 0.2 seconde. Il tourne à nouveau de 45° dans le sens horaire et le robot avance de 0.4 seconde. Il tourne à 45° dans le sens horaire et avance de 0.4 seconde. Il tourne à 45° et avance de 0.6 seconde. On augmentera le déplacement de 0.2 seconde tous les 2 déplacements. Cette spirale ne durera pas plus de 30 secondes.
Récapitulatif :
- Le robot avance 0.2 seconde tourne à 45° dans le sens horaire et avance de 0.2 seconde.
- Le robot tourne de 45° dans le sens horaire, il avance 0.4 seconde tourne à 45° dans le sens horaire et avance de 0.4 seconde.
- Le robot tourne de 45° dans le sens horaire, il avance 0.6 seconde tourne à 45° dans le sens horaire et avance de 0.6 seconde.
- Le robot tourne de 45° dans le sens horaire, il avance 0.8 seconde tourne à 45° dans le sens horaire et avance de 0.8 seconde.
- Et ainsi de suite.
- Avant de réaliser le programme, dessiner sur votre document le déplacement obtenu. Que remarquons-nous?
Tablette : la rotation sera définie directement avec le bloc "déplacement et direction"; "puissance" = 100; "Activé pendant (degrés)" = 180°
Ordinateur :
Le programme final sera présenté à l'enseignant qui validera le programme "prénoms spirale 2".
Pouvons-nous affirmer que nous venons de réaliser une spirale? Pourquoi? :
Pouvons nous l'améliorer? Comment?
1 - 5 - La 2ème spirale sur ordinateur
Créer la même spirale mais en ajoutant des opérateurs logiques et des variables. Vous ne pouvez le faire que sur ordinateur.
2 - Déplacement : éviter un obstacle.
SCENARIO : Le robot avance tout droit. Dès qu'il rencontre un obstacle, il recule 1 seconde et tourne lentement dans le sens horaire. Et ainsi de suite...
Récapitulatif :
- Le robot avance tout droit
- Dès qu'il rencontre un obstacle, il recule 1 seconde et tourne lentement dans le sens horaire.
- On retourne au niveau 1
3 - Déplacement : Éviter le vide
SCENARIO : Le robot avance tout droit. Dès qu'il rencontre le vide, il recule 1 seconde et tourne lentement dans le sens horaire. Et ainsi de suite...
Récapitulatif :
- Le robot avance tout droit
- Dès qu'il rencontre le vide, il recule 1 seconde et tourne lentement dans le sens horaire.
- On retourne au niveau 1
Coup de pouce 1 : éviter un mur
4 - Déplacement : Éviter le vide ou un obstacle
SCENARIO : Le robot avance tout droit. Dès qu'il rencontre le vide ou un obstacle, il recule 1 seconde et tourne lentement dans le sens horaire. Et ainsi de suite...
Récapitulatif :
- Le robot avance tout droit
- Dès qu'il rencontre le vide ou un obstacle, il recule 1 seconde et tourne lentement dans le sens horaire.
- On retourne au niveau 1
Coup de pouce 1 : éviter un mur